Voici un exemple d'interruption materielle. Quand on presse ou qu'on relache une touche du clavier d'un PC, Une interruption est envoyee au processeur. Le processeur va en reponse executer une routine pour traiter l'evenement dont il a ete averti par le processeur (une touche a ete pressee ou relachee). Cette routine va plus specifiquement interroger le clavier pour savoir quelle touche a ete pressee, puis il va eventuellement afficher le caractere correspondant et le stocker dans un buffer. Une fois la routine de traitement des caracteres terminee, la tache interrompue reprend.
7.1.2 Executer la bonne routine : la table des vecteurs d'interruptions
Une table permet d'associer a chaque interruption une routine a executer, c'est la table IDT (Interrupt Descriptor Table). A chaque interruption est associe un "vecteur" qui est un index dans cette table afin de declencher la bonne procedure.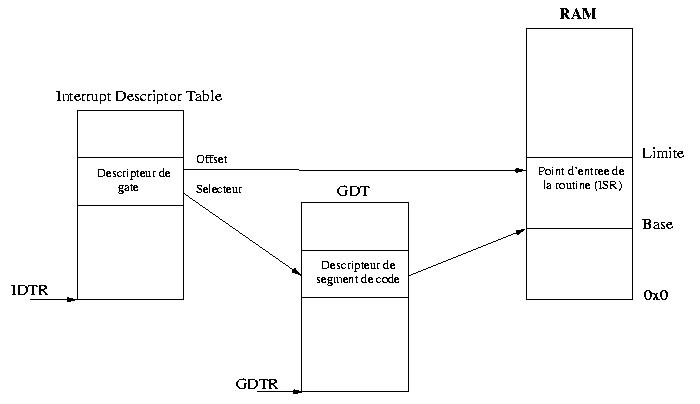
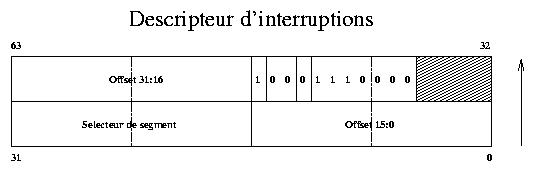
La table IDT contient des descripteurs systemes appeles 'gates'. Il y a plusieurs types de gates, mais pour traiter les interruptions materielles et les exceptions, ont utilise classiquement les 'interrupt gate'. Un gate est une structure qui pointe sur une routine.
7.2 Le controleur d'interruptions
7.2.1 Des interruptions materielles gerees par un chipset : le 8259A (1)
Les interruptions materielles sont les sonnettes que tirent les peripheriques pour dire au processeur que quelque chose se passe. Mais si chaque peripherique pouvait envoier directement un signal au processeur, il faudrait sur celui-ci autant de broche (jouant le role de cordons de sonnette) que de peripheriques. Pour eviter cela, les peripheriques envoient leur requete d'interruption a un chipset auquel ils sont connectes, le 8259A, appele aussi "Programmable interrupt controler" (PIC). C'est ce chipset qui va envoyer a leur place une interruption au processeur.Chaque 8259A peut gerer les interruptions de 8 peripheriques mais la plupart des PC ont deux controleurs cascades entre eux, ce qui leur permet de gerer jusqu'a 14 peripheriques. Le second controleur (l'esclave) est chaine au premier (le maitre).
Les requetes faites par le controleur sont appelees IRQ (Interrupt Request).
7.2.2 Des interruptions materielles gerees par un chipset : le 8259A (2)
Quand un peripherique transmet au 8259A une requete pour une interruption, celle-ci subit un traitement complexe :- la requete passe au travers d'un masque (Interrupt Mask Register). Si l'interruption est masquee, son traitement finit ici.
- le registre IRR est charge de gerer les priorites entre interruptions. La requete avec la plus haute priorite est evaluee.
- le 8259A signale au processeur la demande d'interruption.
- Le processeur acquitte ce signal puis demande au controleur, par un autre signal, le numero de l'interruption demandee afin de declencher la bonne routine.
- le controleur depose sur le bus de donnees un octet, le vecteur d'interruptions.
- Une fois la routine terminee, le processeur doit envoyer au controleur un signal pour l'avertir que tout est fini et que tout peut recommencer.
Un controleur peut ainsi realiser des fonctions plus complexes que la simple transmission d'interruptions. Il est possible de masquer des interruptions, de definir des priorites, etc. Ce fonctionnement est librement parametrable. La partie suivante explique comment il est possible de parametrer un controleur.
7.2.3 Parametrer le controleur d'interruptions
7.2.3.1 Envoyer des parametres en utilisant les ports d'entree/sortie
Il est possible de parametrer les deux PIC d'un PC en utilisant les ports d'entree/sortie. On accede au controleur maitre via les ports 0x20 et 0x21 et au controleur esclave via les ports 0xA0 et 0xA1. En ecrivant sur l'un de ses ports, on envoie au controleur des donnees qui seront inscrite dans l'un de ses registres. Les valeurs placees dans les registres internes du controleur determinent son fonctionnement.7.2.3.2 Des registres pour stocker les parametres du controleur
On parametre un controleur en mettant des valeurs dans ses registres internes. Il y a deux types de registres, les ICW et les OCW.Les registres ICW (Initialization Command Word) reinitialisent le controleur quand ils sont fournis.
Les registres OCW (Operation Control Word) permettent de parametrer certaines fonctions du controleur une fois que celui-ci a ete initialise.
Les encadres ci-dessous presentent les differents registres avec leur signification.
ICW1 (port 0x20 and 0xA0)
|0|0|0|1|x|0|x|x|
| | +--- avec ICW4 (1) ou sans (0)
| +----- un seul 8259 (1), ou cascades (0)
+--------- declenchement par niveau (1) ou par front (0)
|
ICW2 (port 0x21 et 0xA1)
|x|x|x|x|x|0|0|0|
| | | | |
+----------------- bits A7-A3 du vecteur d'interruption
Comme il n'y a que 8 interruptions possible par PIC, seuls les 3 bits
de poids faible comptent dans le vecteur pour determiner l'interruption.
Les 5 autres bits, de poids fort, servent a calculer l'adresse du
vecteur.
|
ICW3 (port 0x21 et 0xA1)
|x|x|x|x|x|x|x|x| pour le maitre
| | | | | | | |
+------------------ controleur esclave rattache (1), ou non (0)
|x|x|x|x|x|x|x|x| pour l'esclave
| | | | | | | |
+------------------ controleur maitre rattache (1), ou non (0)
|
ICW4 (port 0x21 et 0xA1)
|0|0|0|0|0|0|0|1|
|
OCW1 (ports 0x21 et 0xA1)
|x|x|x|x|x|x|x|x|
| | | | | | | |
+------------------ masque d'interruption etabli (1) ou non (0)
chaque bit correspond a une IRQ
|
OCW2 (ports 0x20 et 0xA0)
|x|x|x|0|0|x|x|x|
| | | +-------- niveau d'interruption
| | |
| | |
+--------------- End Of Interrupt (EOI)
EOI :
001 EOI non specifique
010 NOP
011 EOI specifique
100 Rotation sur EOI automatique
101 Rotation sur EOI non specifique
110 Etablissement de code prioritaire
111 Rotation sur EOI specifique
|
OCW3 (ports 0x20 et 0xA0)
|0|x|x|0|1|x|x|x|
| | | +---- lecture IRR (10) ou lecture ISR (11) a la
| | | prochaine lecture.
| | +------ acquisition d'interruptions par polling (1)
+-------------- NOP (0x), reset (10), set (11)
|
7.2.3.3 Initialiser le controleur en remplissant les registres ICW
Pour initialiser un controleur, il faut remplir ses registres d'initialisation ICW1, ICW2, ICW3 et ICW4 en respectant cet ordre.On remplit chaque registre en envoyant sur le port aproprie les bonnes donnees. Il faut savoir qu'apres avoir transmis les donnees pour le registre ICW1, le controleur attend obligatoirement que lui soit fournis l'octet du registre ICW2. Si il n'y a qu'un seul controleur, il n'est pas la peine de renseigner les registres ICW3 et ICW4.
Ces informations sont transmises en ecrivant sur le port approprie (0x20 et 0x21 pour le maitre, 0xA0 et 0xA1 pour l'esclave)
Les registres OCW peuvent etre rempli a n'importe quel moment apres l'initialisation des PIC. Nous utiliserons uniquement le registre OCW1 pour masquer et demasquer les interruptions.
7.2.3.4 Une routine en assembleur pour initialiser le controleur
Cette sequence initialise le maitre puis l'esclave :
; Maitre mov al,0x11 ; Initialisation de ICW1 out 0x20,al jmp $+2 ; temps d'attente mov al,0x08 ; Initialisation de ICW2 out 0x21,al jmp $+2 mov al,0x04 ; Initialisation de ICW3 out 0x21,al jmp $+2 mov al,0x01 ; Initialisation de ICW4 out 0x21,al jmp $+2 mov al,0xFF ; masquage des interruptions out 0x21,al ; Esclave mov al,0x11 ; Initialisation de ICW1 out 0xA0,al jmp $+2 ; temps d'attente mov al,0x70 ; Initialisation de ICW2 out 0xA1,al jmp $+2 mov al,0x02 ; Initialisation de ICW3 out 0xA1,al jmp $+2 mov al,0x01 ; Initialisation de ICW4 out 0xA1,al jmp $+2 mov al,0xFF ; masquage des interruptions out 0xA1,al |